신기술 동향
의료 로봇 기술 및 개발 동향
서울대학교 기계공학부 한경원 교수서론

의료 로봇 기술은 정밀 수술, 재활 치료, 환자 보조 등 다양한 분야에서 혁신을 이끌고 있습니다. 기존의 단단한 강성 로봇은 높은 정밀도를 갖추었으나, 상대적으로 유연성이 부족하여 조직 손상 위험이 크고, 인간과의 자연스러운 상호작용이 어렵다는 한계를 가지고 있습니다. 이에 따라, 유연한 소재를 활용하는 소프트 로보틱스(Soft Robotics) 기술이 주목받고 있습니다.
소프트 로보틱스는 실리콘, 하이드로젤, 전기활성 폴리머(Electroactive polymer, EAP) 등 유연한 재료를 사용하여 제작되며, 생체 조직과의 자연스러운 적응이 가능하다는 강점을 가집니다. 또한, 공압, 유압, 스마트 소재 기반의 구동 방식을 활용하여 기존 강성 로봇보다 가볍고 안전한 인터랙션이 가능합니다. 이러한 특성 덕분에 소프트 로보틱스는 이식형 의료기기, 재활 보조기기, 원격 의료 시스템, 수술 로봇 등 다양한 의료 분야에서 활발하게 연구되고 있습니다. 본 글에서는 소프트 로보틱스를 활용한 이식형 의료 로봇 및 수술 보조 햅틱 시스템을 중심으로 최신 연구 동향을 살펴보고자 합니다.
소프트 로보틱스의 의료 분야 적용
이식형 의료 로봇
이식형 의료 로봇은 신체 내부에 삽입되어 특정 기능을 보조하거나 치료 효과를 높이는 장치입니다. 기존 이식형 의료 기기는 주로 금속, 플라스틱과 같은 강성 재료로 제작되었으며, 장기간 사용 시 조직과의 마찰로 인해 염증, 섬유화(fibrosis) 등 부작용이 발생할 가능성이 있었습니다. 또한, 고정된 형태의 기계적 구조로 인해 신체의 생리적 변화에 유연하게 대응하기 어려운 한계가 있었습니다.
이러한 문제를 해결하기 위해 소프트 로보틱스를 적용한 이식형 의료 로봇이 개발되고 있습니다. 소프트 로봇은 생체조직과 유사한 물성을 가지며, 신체 내부에서 부드럽게 변형될 수 있어 인체 적응성이 뛰어납니다. 또한, 공압 및 유압 기반 구동 기술을 적용하면 외부 기계적 장치 없이도 조직을 압박하거나 움직임을 조절할 수 있어 치료 효과를 극대화할 수 있습니다.
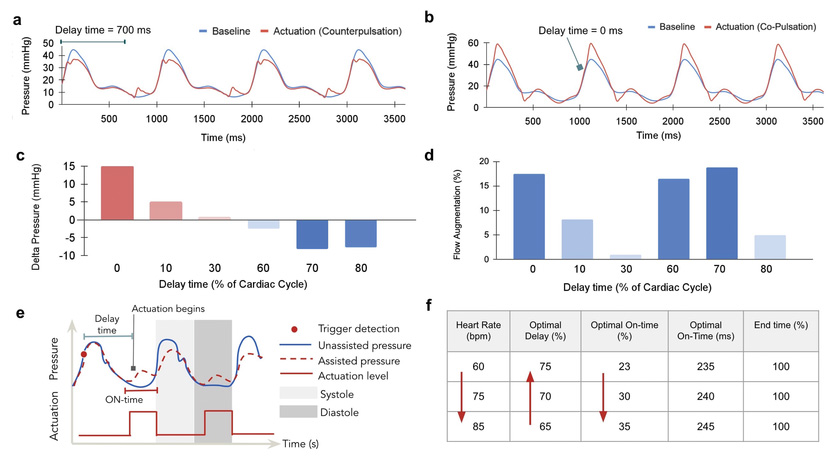
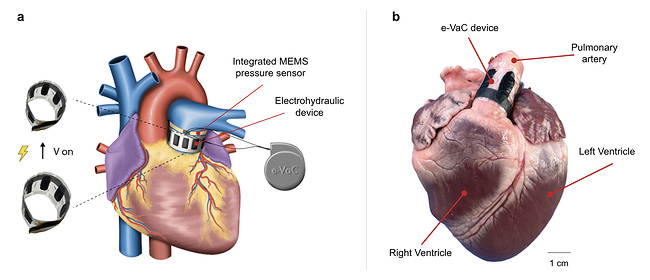
예를 들어, 최근 연구에서는 심부전 환자의 혈류를 보조하는 electrohydraulic vascular compression device (e-VaC) 소프트 구동기가 개발되었습니다1) 이 기기는 폐동맥을 감싸 심실 내 압력을 조절하며, 심장이 수축할 때는 폐동맥을 압박하여 최고 압력을 높이고, 이완할 때는 압박을 조절하여 co-pulsation 효과를 통해 혈류를 최적화합니다(그림1, 2). 기존의 기계적 펌프와 달리, e-VaC는 부드러운 재료를 사용하여 폐동맥과 안전하게 상호작용하며, 환자의 생리적 특성에 맞춘 맞춤형 치료가 가능합니다.
수술 보조 및 햅틱 의료 기기
정밀한 외과적 시술에서는 외과의의 촉각이 매우 중요한 역할을 합니다. 기존의 로봇 수술 시스템은 고해상도 카메라와 로봇 팔을 활용하여 시각적 정보를 강화하였지만,촉각 정보(haptic feedback)를 충분히 제공하지 못한다는 한계를 가지고 있습니다. 특히, 원격으로 진행되는 로봇 수술에서는 수술 중 조직의 강도나 저항을 정확하게 인지하기 어려워, 숙련된 외과의도 직관적인 판단이 어렵습니다.
이러한 문제를 해결하기 위해 소프트 로보틱스를 기반으로 한 햅틱 피드백 기술이 개발되고 있습니다. 소프트 햅틱 장치는 유연한 소재와 스마트 구동기를 활용하여 손끝이나 피부에 안전하게 직접적인 촉각 정보를 제공할 수 있으며, 이를 통해 원격 수술 환경에서도 외과의가 조직의 특성을 더 직관적으로 인지할 수 있도록 돕습니다.
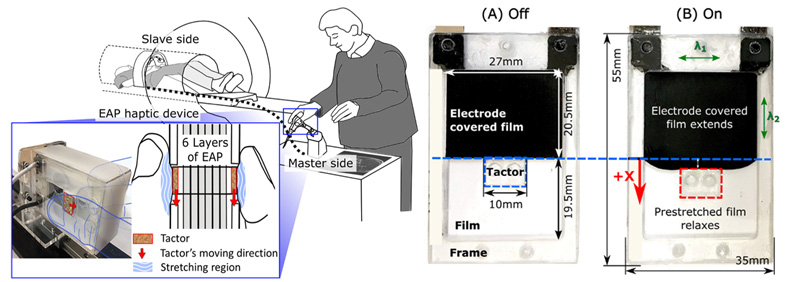
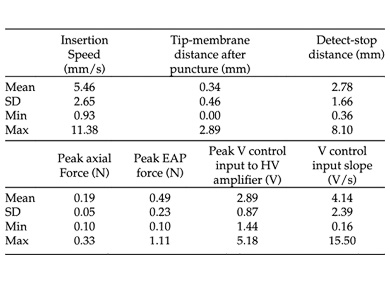
최근 연구에서는 원격 바늘 삽입 시술용 햅틱 피드백 장치가 개발되었습니다2). 이 장치는 원격으로 바늘을 삽입하는 동안 시술자가 바늘이 얇은 막을 뚫는 느낌을 손가락을 통해 직접 느낄 수 있도록 설계되었습니다(그림3). 이를 위해 전기활성 폴리머(Electroactive Polymer) 기반의 소프트 구동기를 활용하여 의사의 엄지와 검지 손가락의 피부를 스트레치시키는 방식으로 햅틱 피드백을 제공하였습니다. 실험 결과, 해당 햅틱 장치를 사용한 경우, 시각 정보 없이도 98%의 정확도로 얇은 막을 뚫는 순간을 감지할 수 있었습니다(표1). 이는 원격 의료 환경에서 시술의 정확도를 높이고, 외과적 절차의 안전성을 향상시키는 데 기여할 것으로 기대됩니다.
최신 연구 및 기술 개발 동향
최근 소프트 로보틱스 기술은 의료 분야에서 더욱 정밀하고 효과적인 치료 솔루션을 제공하기 위해 급속도로 발전하고 있습니다. 특히, 자기 치유 소재, 디지털 트윈 및 AI 기반 로봇 제어, 원격 의료 및 수술 로봇 등의 분야에서 혁신적인 연구가 진행되고 있습니다. 이러한 기술들은 의료 로봇의 내구성, 환자 맞춤형 치료, 그리고 원격 환경에서도 정밀한 의료 서비스를 가능하게 하는 중요한 요소로 자리 잡고 있습니다.
-
자기 치유 및 생체 모사 소재 적용: 최근에는 손상된 후 스스로 복구할 수 있는 자기 치유형 하이드로젤 기반 소프트 로봇이 개발되고 있습니다. 이 기술은 이식형 의료 로봇이나 웨어러블 기기의 내구성을 높이고, 장기간 사용이 필요한 의료 환경에서 유지 보수를 최소화하는 데 기여할 수 있습니다3).
-
AI 및 디지털 트윈 기반 로봇 제어: 의료용 소프트 로봇의 움직임을 실시간으로 최적화하기 위해 AI 기반 머신 러닝 모델과 디지털 트윈(Digital Twin) 기술이 결합되고 있습니다. 디지털 트윈은 환자의 신체 데이터를 기반으로 가상의 로봇 모델을 생성하여 시뮬레이션하고, 이를 통해 실시간으로 로봇의 동작을 조정하는 기술입니다4).
-
로봇 수술과 원격 의료 적용 확대: 5G 및 초고속 데이터 전송 기술이 발전하면서, 소프트 로보틱스를 활용한 원격 수술 시스템이 개발되고 있습니다. 기존 원격 의료 시스템과 달리, 소프트 햅틱 피드백과 AI 보조 제어 기술이 결합되어 수술 시 의사의 촉각 피드백을 제공할 수 있는 차세대 시스템이 연구되고 있으며, 실제 임상 실험에서도 점차 적용되고 있습니다5).
결론 및 전망
소프트 로보틱스는 기존 의료 로봇의 한계를 극복하고, 정밀한 의료 시술 및 환자 맞춤형 치료에 기여할 수 있는 핵심 기술로 자리 잡고 있습니다. 향후, 생체 모사 소재, AI 제어 기술, 원격 의료 시스템과의 융합이 더욱 가속되면서, 의료 분야에서 소프트 로보틱스의 활용 가능성은 더욱 확대될 것으로 전망됩니다.
참고문헌
- 1) Pirozzi, I., et al. "Electrohydraulic Vascular Compression Device (e-VaC) with Integrated Sensing and Controls." Advanced Materials Technologies 8.4 (2023): 2201196.
- 2) Han, A.K., et al. "MR-compatible haptic display of membrane puncture in robot-assisted needle procedures." IEEE transactions on haptics 11.3 (2018): 443-454.
- 3) Zhao, X., et al. "Hydrogels in Soft Robotics: Past, Present, and Future." ACS Nano 17.1 (2023): 37-48
- 4) Kang, J., et al. "Generative AI-Driven Human Digital Twin in IoT-Healthcare: A Comprehensive Survey." arXiv preprint arXiv:2401.13699 (2024).
- 5) Meng, L., et al. "Digital Twin Assisted Surgery: Concept, Opportunities, and Challenges." npj Digital Medicine 7.1 (2024): 14.