신기술 동향
휴머노이드 로봇 보행 기술 및 개발 동향
서울대학교 융합과학기술대학원 지능정보융합학과 박재흥, 이관우, 박경재, 차우현



서론
휴머노이드 로봇은 인간을 대신하여 위험하거나 복잡한 작업을 수행할 수 있는 다목적 플랫폼으로 재난 대응, 산업 현장, 일상생활 등 다양한 분야에서 활용 가능성을 주목받고 있다. 전 세계적으로 휴머노이드 로봇의 필요성이 증가함에 따라 이에 대한 연구와 개발도 활발히 이루어지고 있다. 특히 실제 환경에서 활용되기 위한 가장 중요한 기술 중 하나로 강건한 이족 보행 능력이 꼽히고 있다. 이족 보행 알고리즘은 1990년대부터 꾸준히 연구되어 많은 발전을 이루었으나, 여전히 다양한 외란과 불확실성이 존재하는 실제 환경에서 안정적 보행을 구현하기 위한 추가 연구가 필요한 상황이다.
이번 글에서는 휴머노이드 로봇의 최신 동향과 모델 기반 및 강화 학습 기반 이족 보행 기술을 중심으로 최신 연구 동향을 살펴본다.
휴머노이드 로봇 최신 동향
미국의 보스턴 다이내믹스(BOSTON DYNAMICS)는 과거 유압식 구동 방식을 적용한 휴머노이드 로봇 'HD Atlas'를 통해 고난도 이족 보행, 점프, 장애물 극복 등 역동적인 움직임을 구현하는 기술을 선보인 바 있다. 최근에는 전기식 구동 방식으로 전환하여 더 정교한 움직임을 보이며 자율성이 향상된 'Atlas'를 공개했다. 새로운 Atlas는 다양한 센서와 비전 기반의 머신 러닝 기술을 활용하여 실제 환경에서도 복잡한 작업을 더 안정적으로 수행할 수 있도록 진화하고 있다.
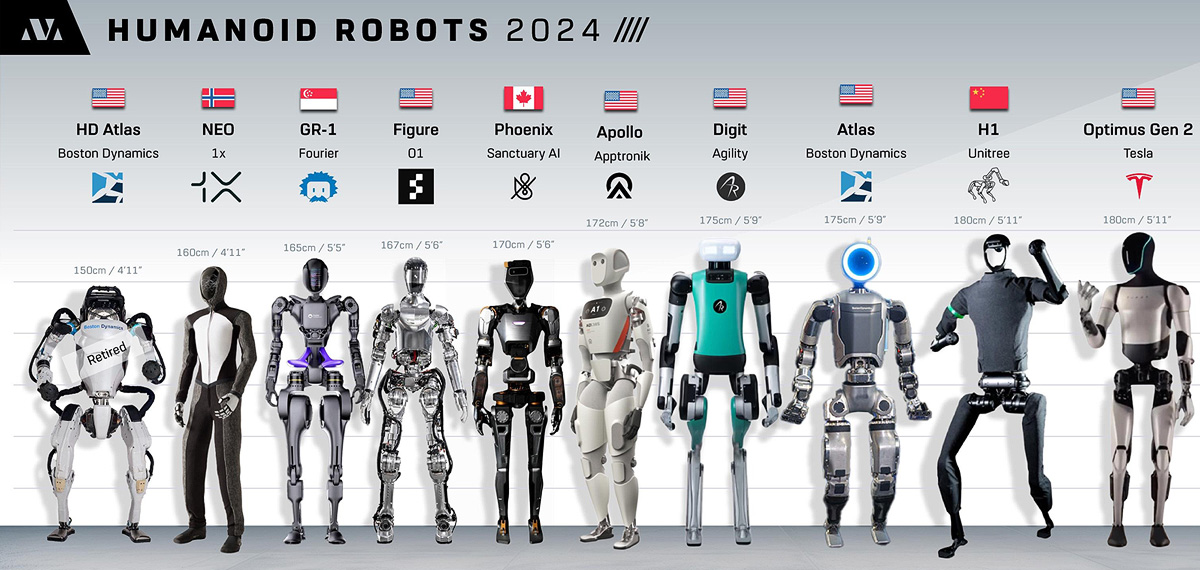
또한 미국의 테슬라(TESLA)는 휴머노이드 로봇 'Optimus'를 개발하고 있으며, 2022년 AI Day에서 최초의 시제품을 공개하였다. Optimus는 산업 현장에서 반복적이거나 위험한 작업을 인간 대신 수행하도록 설계되었으며, 테슬라가 보유한 자율 주행 기술을 활용한 AI 기반 인식 및 제어 시스템이 탑재되어 있다. 2023년에는 무게를 10kg 줄이고 보행 속도를 30% 향상시킨 2세대 프로토 타입을 공개하여 주목받았다. 특히 2세대 로봇은 손가락의 촉각 센서를 활용해 계란을 옮기는 등 정교한 물체 조작이 가능하며, 팔다리의 위치를 공간상에서 정확히 파악하여 요가 자세를 유지하는 등 한층 향상된 유연성을 선보였다.
미국의 스타트업 피규어(FIGURE)는 인공지능 기반 범용 휴머노이드 로봇 'Figure 01'을 개발, 2024년 프로토 타입을 공개하며 주목받았다. 최근 피규어는 BMW와 협력해 미국 스파르탄버그 공장에서 2세대 휴머노이드 로봇 'Figure 02'의 테스트를 진행하였다. Figure 02는 이전 모델에 비해 처리 능력과 정확성이 크게 향상되었으며, 고성능 카메라 및 센서를 활용하여 하루 최대 1000건의 부품 작업을 처리할 수 있다. 특히 정확성은 7배 증가하고 작업 속도는 4배 빨라져 자동화 성능과 생산 효율성을 획기적으로 높일 것으로 기대되고 있다.
중국의 로봇 기업인 유니트리(UNITREE)는 최근 두 가지 휴머노이드 로봇을 선보이며 글로벌 시장에서 주목받고 있다. 보급형 로봇인 G1은 키 132cm, 무게 약 35kg의 가벼운 휴머노이드 로봇으로, 최대 초속 2m의 이동 속도를 갖추고 있으며 팔다리를 접어 휴대가 가능하다. 고성능 모델인 H1은 키 180cm, 무게 47kg으로 인간과 유사한 크기이며, 초속 3.3m의 빠른 이동 속도를 자랑한다. 특히 두 로봇 모두 3D LiDAR와 Depth Camera를 활용한 고정밀 공간 인식 기술을 탑재하여 복잡한 지형에서도 안정적인 보행과 다양한 작업 수행이 가능한 것이 특징이다.
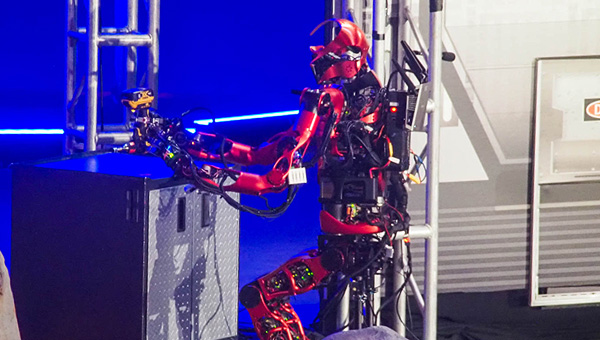

국내에서도 휴머노이드 로봇 기술 개발이 활발히 이루어지고 있다. 서울대학교는 자체 개발한 휴머노이드 로봇 '토카비(TOCABI)'를 기반으로, 정교한 보행 제어, 원격 조작, 햅틱 피드백, 자율 인지 등 다양한 핵심 기술을 개발하고 있다. 토카비는 사람과 유사한 크기의 이족 보행 로봇으로, 원격 조작자가 마치 자신의 신체처럼 다룰 수 있도록 고정밀 제어와 햅틱 상호작용 기술이 적용된 것이 특징이다. 특히, 서울대학교 연구팀은 토카비를 활용해 2022 ANA Avatar XPrize 대회에 참가하여 결승에 진출하는 성과를 거두며 아바타 로봇 분야에서의 글로벌 경쟁력을 입증하였다(그림2).
보행 연구 최신 동향
휴머노이드 로봇의 보행 기술은 크게 모델 및 학습 기반 알고리즘 두 가지로 구분된다. 본 섹션에서는 이러한 두 가지 보행 기술의 핵심 원리와 주요 연구 동향을 설명한다.
모델 기반 보행 알고리즘
모델 기반 제어 방법은 휴머노이드 로봇의 복잡한 동역학 및 기구학적 특성을 수학적으로 모델링하고, 사전에 계획된 보행 궤적을 정확히 추종하도록 제어하는 접근법이다. 휴머노이드 로봇은 구조적으로 높은 자유도와 복잡한 움직임을 가지기 때문에, 로봇의 동작을 수학적으로 묘사하는 모델은 일반적으로 고차원(high-dimensional), 비선형(non-linear)이며 비볼록(non-convex)한 특성을 가진다.
이러한 모델 기반 제어는 로봇의 동역학 특성을 명확하게 이해할 수 있으며, 수학적 모델을 이용하여 제어기의 안정성과 수렴성을 보장할 수 있다. 그러나 실제 로봇 시스템에 정확히 적용하기 위해서는 모델 구축과 파라미터 튜닝 과정에서 많은 시간과 노력이 필요하다. 또한 실제 환경에서 발생할 수 있는 모델 오차와 불확실성을 모두 반영하기 어려운 한계가 있다.
이러한 한계를 극복하고 로봇의 하드웨어 성능을 최대한 끌어내기 위해서는 단순한 오프라인 모션 계획이나 선형 제어만으로는 한계가 있으며, 첨단 제어 기법의 도입이 필수적이다. 최근에는 이러한 문제를 극복하기 위해 모델 예측 제어(MPC: Model Predictive Control) 기술이 활발히 연구되고 있다.
MPC 기반의 이족 보행 제어 접근법은 크게 두 가지 방식으로 나뉜다.
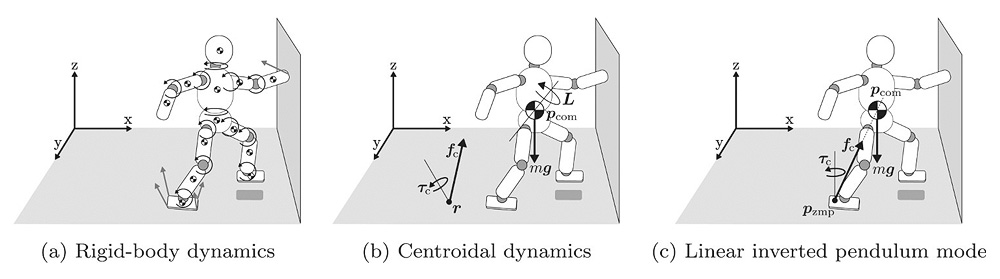
첫 번째 방법은 [그림3]의 (a)와 같은 로봇의 실제 동역학 모델을 직접 활용하여 MPC를 통해 최적 제어 입력을 계산하는 방식이다. 이 방법은 휴머노이드 로봇의 실제 동역학을 정밀하게 반영하므로 이론적으로 더욱 동적이고 정확한 움직임 생성이 가능하다. 하지만 높은 차원의 비선형성과 비볼록성으로 인해 최적화 계산 시간이 크게 증가하며, 국소 최소점(local minima)에 빠질 가능성도 있다. 최근에는 이러한 문제를 해결하기 위해 'Sequential Quadratic Programming(SQP)'이나 'Differential Dynamic Programming(DDP)' 등 비선형 최적화 알고리즘을 활용하여 실시간성을 높이고 최적화 성능을 개선하는 연구가 활발히 이루어지고 있다.
두 번째 접근법은 로봇의 복잡한 동역학을 [그림3]의 (b)와 (c)와 같은 간략화된 모델로 표현한 뒤, 해당 모델들을 바탕으로 MPC를 통해 최적 제어 입력(예: 지면 접촉력, 질량 중심 위치, 몸통 회전 등)을 계산하고, 이를 실제 로봇의 역동역학 제어기(Whole-body inverse dynamics controller)가 실시간으로 추종하는 방식이다. 이 방법은 계산 부담을 낮추면서도 로봇 하드웨어의 동적 성능을 최대한 활용할 수 있다는 장점이 있다. 하지만 간략화한 모델로 계산된 최적 제어 입력과 실제 로봇 동역학 간의 차이로 인해, 매우 동적인 움직임의 생성이 어렵거나 로봇 구동기의 하드웨어적 제약을 충분히 반영하지 못할 수 있다는 한계가 존재한다.
이처럼 모델 기반 휴머노이드 보행 제어는 로봇의 성능 한계를 극복하면서도 실시간성을 유지할 수 있도록 다양한 접근 방법을 통해 지속적으로 발전하고 있다.
학습 기반 휴머노이드 보행 및 전신 제어 알고리즘
학습 기반 휴머노이드 보행 및 전신 제어 알고리즘은 딥러닝(Deep Learning)과 강화 학습(Reinforcement Learning, RL) 등 최신 인공지능 기술을 활용하여 로봇 제어기를 학습시키는 접근 방식이다. 보행 제어와 관련된 학습 기반 연구는 크게 강화 학습을 위한 보상 함수 설계에 초점을 맞춘 연구와 제공된 모션 패턴을 모방하는 것에 초점을 맞춘 모방 학습(Imitation Learning) 기반 연구로 구분할 수 있다.
Siekmann 등은 이족 보행의 주기적인 움직임에 집중하여 주기성을 반영한 독창적인 보상 함수를 제안하였다. 이러한 보상 함수 설계를 통해 사용자의 명령에 따라 걷기(walking), 도약 보행(skipping), 점프(jumping), 달리기(running) 등 다양한 보행을 구현 가능하다1). 하지만 이와 같은 방식은 사전에 의도한 보행 패턴을 생성하기 위한 보상 함수의 정밀한 설계에 많은 시간과 노력이 요구된다는 한계가 존재한다.
최근 연구 동향에서는 모방 학습 기반 접근법이 주도적인 방식으로 자리 잡고 있다. 컴퓨터 그래픽스 분야 연구자인 Peng 등은 물리 기반 시뮬레이션 환경에서 인간의 모션 캡처 데이터를 모방하도록 간단한 보상 함수를 설계하고, 이를 강화 학습에 적용하는 방식을 제안하였다2). 이후 이러한 모방 학습 기반 제어기를 실제 휴머노이드 로봇의 보행 제어로 확장하는 연구들이 잇따라 발표되었다3). 그러나 단일 모션 데이터만을 모방할 수 있어 다양한 동작 간 전환(transition)을 학습하기 어렵다는 한계가 지적되고 있다.
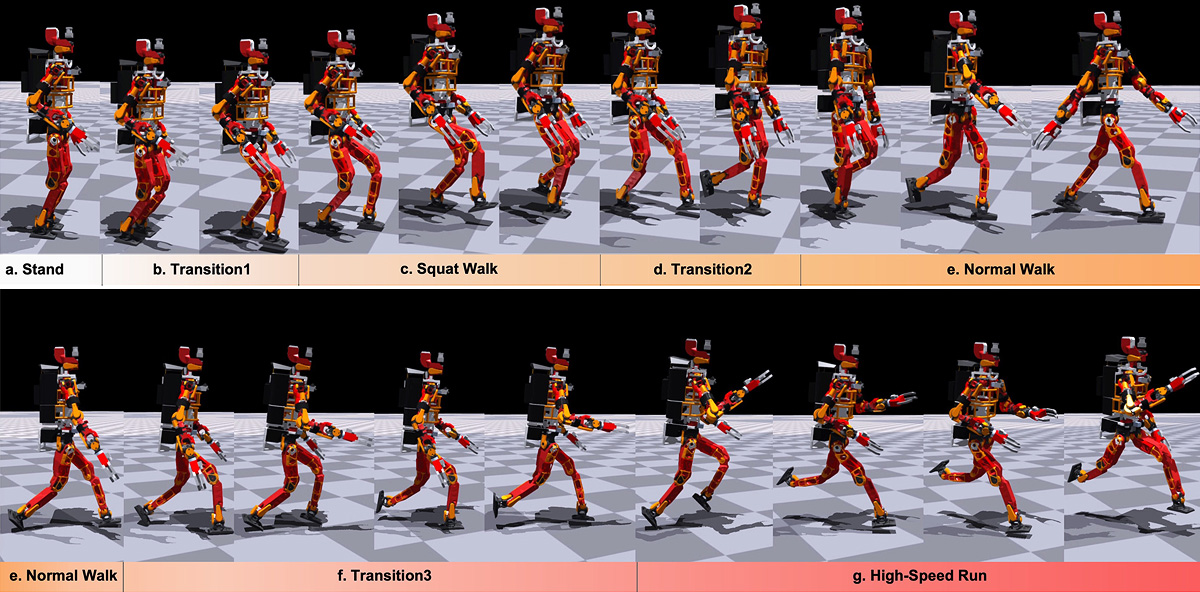
이러한 한계를 극복하기 위해 생성형 딥러닝(Generative Deep Learning) 알고리즘을 활용한 새로운 연구도 제안되었다. Peng 등은 다수의 모션 데이터를 모방하는 동시에 서로 다른 모션 간 전환을 학습할 수 있는 제어기를 개발하였다4). 이를 통해 하나의 제어기로 여러 작업 간의 전환이 가능하게 되었으며, Tang 등은 이를 휴머노이드 로봇 보행 제어에 적용한 연구도 최근 보고하였다(그림4).
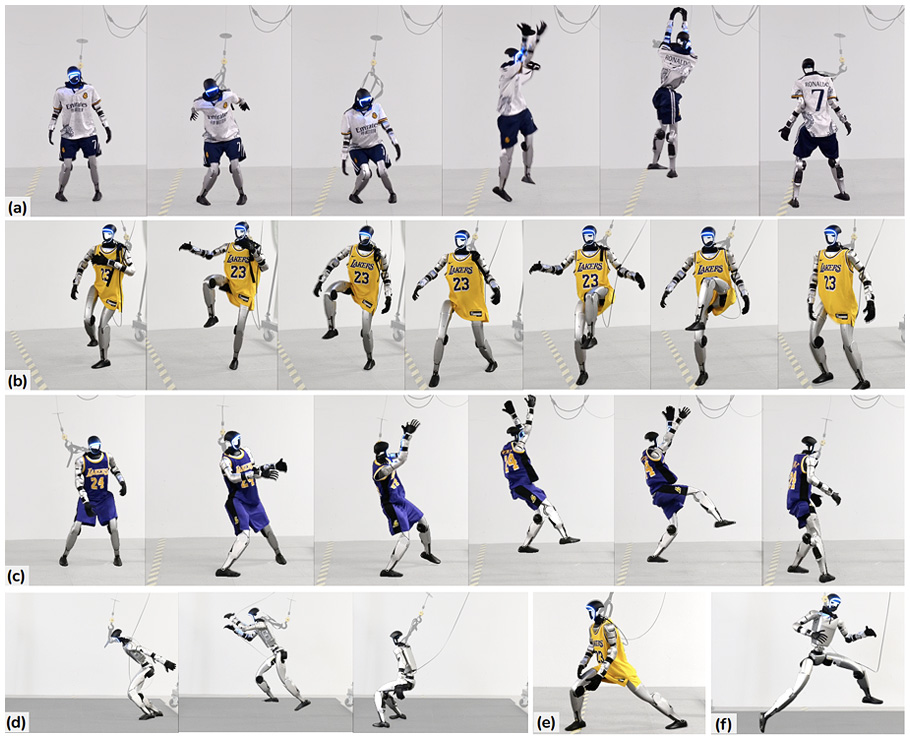
한편, 지금까지의 많은 연구가 보행 제어에 초점을 맞춘 것과 달리, 전신 제어를 대상으로 하는 학습 기반 연구도 활발히 이루어지고 있다. He 등은 역동적인 인간의 다양한 동작을 모방하는 전신 제어기를 제시하였다(그림5). 이러한 전신 제어를 대상으로 하는 학습 기반 연구들은 단순 보행을 넘어 복잡한 상체 동작, 물체 조작, 유연한 자세 변화 등을 포함하는 종합적인 신체 제어로의 확장을 시도하고 있다는 점에서 주목할 만하다.
이처럼 딥러닝과 강화 학습을 기반으로 한 휴머노이드 보행 및 전신 제어 기술은 빠른 속도로 발전하고 있으며, 보행뿐만 아니라 인간과 유사한 전신 동작을 수행할 수 있는 고도화된 제어기의 개발로 나아가고 있다.
결론
휴머노이드의 보행 제어 기술은 모델 기반 접근법과 학습 기반 접근법으로 나뉘어 각각 발전하고 있으며, 최근에는 이러한 두 방식을 복합적으로 활용하여 더 높은 성능을 구현하는 연구도 발표되고 있다. 두 분야 간의 경쟁과 상호 보완은 보행 기술의 비약적인 발전을 이끌고 있으며, 이러한 기술의 진보는 산업, 서비스, 재난 대응 등 다양한 분야에서 휴머노이드 로봇의 활용 가능성을 획기적으로 확장할 것으로 기대된다.
참고문헌
- 1) Siekmann, Jonah, et al. "Sim-to-real learning of all common bipedal gaits via periodic reward composition." 2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021.
- 2) Peng, Xue Bin, et al. "Deepmimic: Example-guided deep reinforcement learning of physics-based character skills." ACM Transactions On Graphics (TOG) 37.4 (2018): 1-14.
- 3) Kim, Donghyeon, et al. "Torque-based deep reinforcement learning for task-and-robot agnostic learning on bipedal robots using sim-to-real transfer." IEEE Robotics and Automation Letters 8.10 (2023): 6251-6258.
- 4) Peng, Xue Bin, et al. "Amp: Adversarial motion priors for stylized physics-based character control." ACM Transactions on Graphics (ToG) 40.4 (2021): 1-20.
그림 출처
- 그림1. https://www.visualcapitalist.com/cp/visualizing-the-current-generation-of-humanoid-robots/
-
그림2.
https://www.anahd.co.jp/ana_news/2023/03/15/20230315.html
Hauser, Kris, et al. "Analysis and perspectives on the ana avatar xprize competition." - 그림3. Katayama, S., Murooka, M., & Tazaki, Y. (2023). Model predictive control of legged and humanoid robots: models and algorithms. Advanced Robotics, 37(5), 298-315
- 그림4. Tang, Annan, et al. "Humanmimic: Learning natural locomotion and transitions for humanoid robot via wasserstein adversarial imitation." 2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024.
- 그림5. He, Tairan, et al. "ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills." arXiv preprint arXiv:2502.01143 (2025).