신기술 동향
웨어러블 로봇 기술 및 개발 동향
서울대학교 기계공학부 박용래 교수들어가는 글
웨어러블 로봇은 인간의 근력을 보조하거나 증강하는 기술로, 재활 치료, 산업 현장, 그리고 일상생활에서 널리 활용되고 있다1). 특히, 최근에는 견고한 구조의 엑소스켈레톤 로봇과 유연한 구조의 소프트 웨어러블 로봇이 각각 발전하면서, 사용자 편의성과 성능이 더욱 향상되고 있다. 또한, 상용화된 웨어러블 로봇의 보급이 증가하면서 실제 의료 및 산업 현장에서의 활용 사례도 늘어나고 있다. 이번 글에서는 단단한 구조의 엑소스켈레톤 로봇, 부드러운 구조의 소프트 웨어러블 로봇, 그리고 현재 상용화된 웨어러블 로봇의 기술 동향을 살펴본다.
단단한 구조의 엑소스켈레톤 로봇
엑소스켈레톤 로봇은 견고한 프레임을 기반으로 사용자의 근력을 보조하거나 증강하는 장치로, 주로 재활 치료 및 산업 현장에서 활용된다. 기존의 엑소스켈레톤은 강성 재료를 사용하여 높은 힘의 증강 또는 보조를 가능하게 하지만, 상대적으로 무겁고 유연성이 부족하다는 단점이 있다. 최근 연구에서는 이러한 한계를 극복하기 위해 경량화, 모듈화, 그리고 인공지능(AI) 기반 제어 기술이 도입되고 있다.
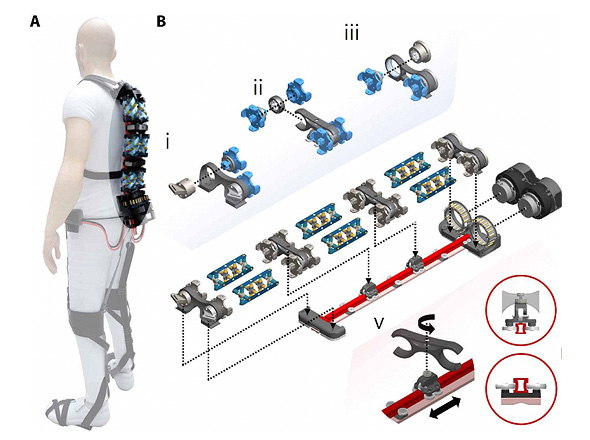
예를 들어, 최근 발표된 모듈형 엑소스켈레톤 시스템은 사용자의 움직임과 필요에 따라 로봇의 구성을 조정할 수 있도록 설계되어, 다양한 작업 환경과 사용자에 맞춰 최적화할 수 있다(그림1). 이를 통해 특정 직업군(예: 물류, 제조업 등)에서 무거운 물건을 쉽게 들어 올릴 수 있도록 도움을 주거나, 반복적인 작업으로 인한 등허리 근육의 부상 방지를 위한 맞춤형 보조를 제공할 수 있으며, 재활 치료에서는 환자의 회복 단계에 따라 지원 강도를 조정할 수 있다2).
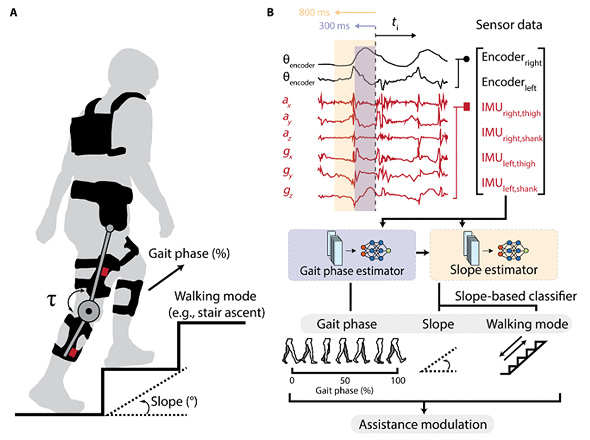
또한, 엑소스켈레톤의 제어 성능을 향상하기 위해 머신러닝 기반 적응형 알고리즘이 적용되고 있다(그림2). 최근 연구에서는 센서를 활용하여 사용자의 보행 패턴과 근육 신호를 실시간으로 분석하고, 이에 맞춰 보조력을 조정하는 기술이 개발되었다. 이러한 시스템은 기존의 고정된 패턴 기반 제어보다 더욱 자연스럽고 효율적인 보행 보조를 가능하게 한다3).
이처럼 단단한 구조의 엑소스켈레톤 로봇은 경량화와 맞춤형 설계를 통해 점차 개선되고 있으며, 향후 다양한 산업 및 재활 치료 환경에서 더욱 적극적으로 활용될 것으로 예상된다.
부드러운 재료의 소프트 웨어러블 로봇
소프트 웨어러블 로봇은 유연한 소재와 공압 또는 스마트 소재를 활용하여 사용자의 움직임을 보조하는 장치이다. 이러한 로봇은 기존의 엑소스켈레톤 로봇보다 가벼우며, 인체에 밀착하여 착용자의 편안함과 안전성을 높이는 데 중점을 두고 있다. 최근 연구에서는 인공 근육 기술, 센서 융합, 그리고 맞춤형 적응 제어를 통해 소프트 웨어러블 로봇의 성능을 더욱 향상하고 있다.
최근 발표된 연구에서는 새로운 형태의 인공 근육을 개발하여 소프트 로봇의 구동력을 대폭 향상하는 기술이 소개되었다. 이 연구에서는 공압을 이용한 팽창형 유연 구조를 이용해 가벼우면서도 높은 출력을 제공하는 구동기를 제안하고 있다(그림3). 이러한 기술은 특히 어깨 근육을 반복적으로 사용하는 산업 근로자의 근육 피로도 저감에 기여할 수 있다4).
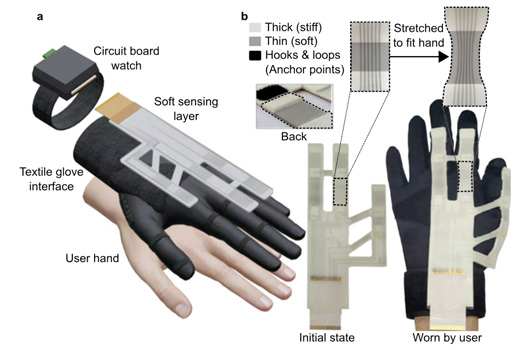
또 다른 연구에서는 소프트 로봇의 센서 기술을 개선하여 사용자의 움직임을 더 정확하게 감지하고 대응할 방법이 제시되었다. 최근 개발된 초박형 유연 센서는 사용자의 관절 각도를 통해 손의 움직임을 실시간으로 파악할 수 있으며, 이를 통해 로봇의 자연스러운 움직임을 원격으로 제어할 수 있게 도와준다(그림4)5).
이처럼 소프트 웨어러블 로봇 기술은 착용감과 성능을 동시에 향상하는 방향으로 발전하고 있으며, 향후 재활 치료뿐만 아니라 스포츠 및 노인 보조 기기 시장에서도 중요한 역할을 할 것으로 기대된다.

현재 상용화된 웨어러블 로봇의 기술 동향
웨어러블 로봇의 상용화가 가속되면서, 다양한 분야에서 실제 제품이 출시되고 있다. 특히, 의료 및 재활 치료용 웨어러블 로봇과 산업용 보조 웨어러블 로봇이 가장 활발하게 개발되고 있으며, AI 및 IoT 기술이 결합된 최신 제품들이 등장하고 있다.
국내 기업인 '위로보틱스(WIROBOTICS)'는 근육 감소로 보행이 어려운 노인을 위한 웨어러블 로봇 '윔(WIM)'을 개발했다. 이 로봇은 허리와 허벅지에 착용하여 보행을 보조하며, 사용자의 걸음걸이에 맞춰 자연스럽게 움직이는 것이 특징이다. 또한, 스마트 센서를 활용하여 보행 패턴을 분석하고, 사용자 맞춤형 보조를 제공하는 기능이 포함되어 있다6).
또한, 국내 웨어러블 로봇 기업인 '엔젤로보틱스(ANGEL ROBOTICS)'는 재활 치료용 웨어러블 로봇 '엔젤렉스(ANGEL LEGS) M20'을 개발하여 의료 현장에서 활용하고 있다. 이 로봇은 AI 기반 보행 분석 시스템을 탑재하여, 사용자의 재활 과정을 실시간으로 모니터링하고 최적화된 운동을 유도한다. 엔젤렉스는 2022년 의료기기 3등급 품목 허가를 획득하였으며, 건강보험 적용이 가능하여 실제 환자들이 사용할 수 있게 되었다7).
이처럼 웨어러블 로봇은 점점 더 상용화되면서 일반 소비자와 산업 현장에서 활용될 기회가 확대되고 있으며, 향후 AI 및 데이터 분석 기술과 결합하여 더욱 발전할 것으로 기대된다.
결론
웨어러블 로봇 기술은 단단한 구조의 엑소스켈레톤과 부드러운 구조의 소프트 웨어러블 로봇으로 나뉘어 각각 발전하고 있으며, 상용화된 제품들도 점점 증가하고 있다. 최신 연구에서는 엑소스켈레톤의 경량화와 맞춤형 제어, 소프트 웨어러블 로봇의 고성능 인공 근육 및 센서 기술, 그리고 실제 의료 및 산업 현장에서의 적용 사례가 중요한 트렌드로 자리 잡고 있다. 향후 웨어러블 로봇 기술이 더욱 발전함에 따라 인간의 삶의 질을 향상하는 데 기여할 것으로 기대된다.
참고문헌
- 1) [KEIT 기술통계리포트 2025-2월 2주차] 웨어러블 로봇, 정보통신기획평가원, 2025.02.11.
- 2) Kim et al., Bilateral Back Extensor Exosuit for multidimensional assistance and prevention of spinal injuries, Science Robotics, 9(92):eadk6717, 2024.
- 3) Lee et al., AI-driven universal lower-limb exoskeleton system for community ambulation, Science Advances, 10(51):eadq0288, 2024.
- 4) Zhou et al., A portable inflatable soft wearable robot to assist the shoulder during industrial work, Science Robotics, 9(91):eadi2377, 2024.
- 5) Park et al., Stretchable glove for accurate and robust hand pose reconstruction based on comprehensive motion data, Nature Communications, 15:5821, 2025.
- 6) "근육감소 노인을 다시 걷게 돕는 혁신로봇... 위로보틱스 '윔' 착용해보니," 동아일보, 2025.03.04.
- 7) "[이달의 K-바이오] 엔젤로보틱스, 성큼 다가온 'AI 휴머노이드 시대' 선도," 바이오타임즈, 2025.02.05.