Soft Wearable Robot for Enhancing Mobility in Individuals with Parkinson’s Disease
Professor Jinsoo Kim
- Importance of Developing Innovative Technologies to Address Freezing of Gait in Parkinson's Disease
- Potential of Hip Flexion Assistance to Avert Freezing
- Need for Further Investigation to Assess Generalizability
Professor Jinsoo Kim in the Department of Electrical and Computer Engineering has been pioneering wearable robotics for healthcare applications. His recent work has led to the development of soft robotic apparel that could potentially help individuals with Parkinson's disease who are suffering from freezing of gait.
Parkinson's disease (PD) is one of the leading causes of disability in the world, with over 10 million people affected globally1. PD is a neurodegenerative disease in which neural pathways between the brain and leg muscles are disrupted, resulting in symptoms that begin gradually and become progressively worse. While PD manifests in numerous ways across different stages, one of its most debilitating symptoms is freezing of gait.
Freezing of gait (FoG) is characterized by a brief, episodic absence or marked reduction in the forward progression of the feet despite the intention to walk2. Many PD patients describe it as if their feet are glued to the floor. Because their feet lag behind the center of mass while walking, FoG is also considered a leading cause of falls.
Currently, several interventions for FoG are available, but all have modest effects and limitations3. For example, dopaminergic medications are the most common intervention to improve motor function in PD patients; nevertheless, as the disease progresses, FoG becomes increasingly resistant to these drugs. Paradoxically, FoG is more prevalent in the later stages of PD. Additionally, there are cueing interventions where, for instance, PD patients take steps in sync with a metronome or step over laser lines on the ground. These auditory or visual cues can reducethe severity of FoG, and some commercialized products offer such cues. However, cueing requires significant cognitive effort and is typically provided after FoG has already begun, rather than as a preventive measure.
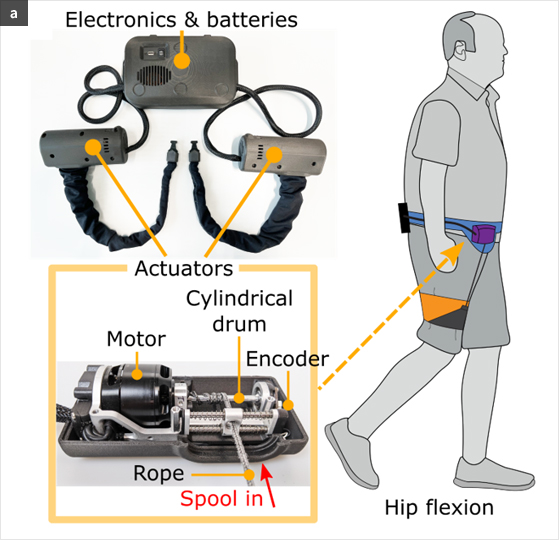
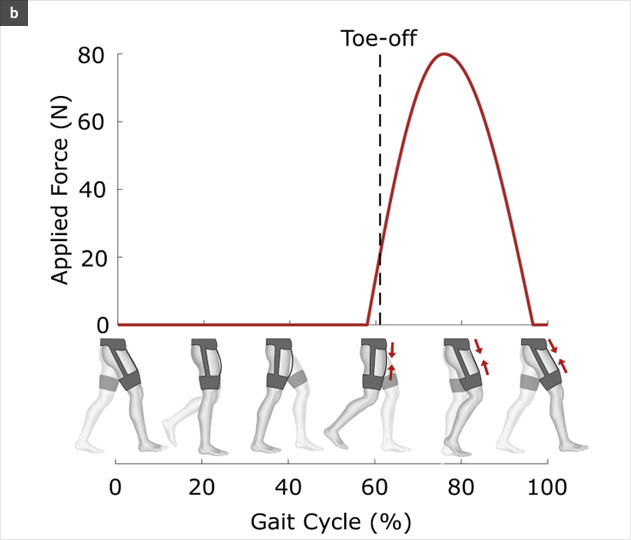
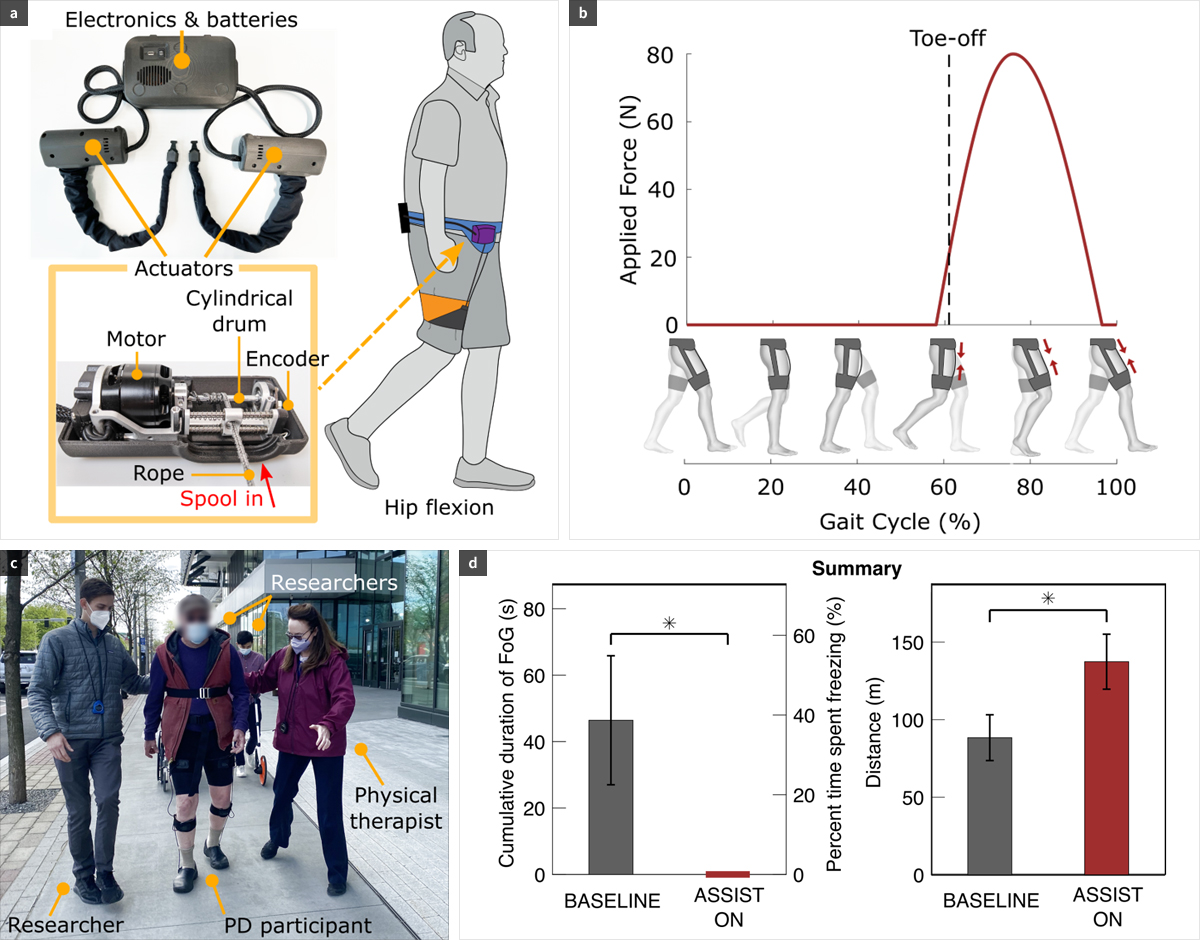
Prof. Kim and his colleagues have demonstrated proof of concept that FoG can be averted using soft robotic apparel that assists hip flexion (the forward swing of the leg)4. This lightweight exosuit (2.3㎏) is designed with low distal inertia and minimal kinematic constraints—key characteristics when targeting clinical populations with low stamina5. The wearable garment uses cable-driven actuators and sensors worn around the waist and thighs. By using motion data from the sensors, algorithms estimate the phase of the walking cycle and deliver assistive forces in sync with biological muscles.
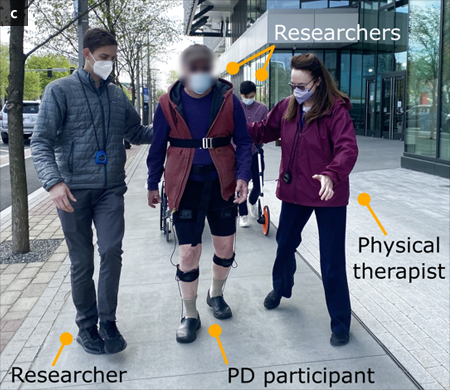
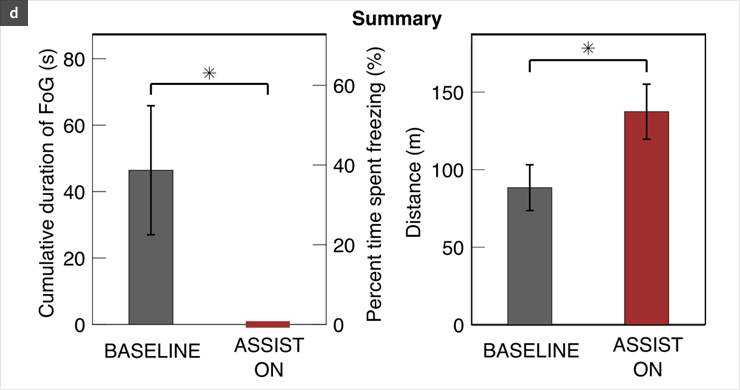
In an n-of-1 trial with five repeated measurements spanning six months, a 73-year-old male with PD and severe FoG exhibited a robust response to the robotic apparel. With assistance, FoG was instantaneously eliminated during indoor walking, and there were clinically significant improvements in walking speed, distance, and gait quality. The device's beneficial effects against FoG were consistent across multiple days, various FoG-inducing conditions, and different environmental contexts, demonstrating its potential for community use. Furthermore, these effects were immediate without any prior training, unlike what is often observed with behavioral approaches.
This raises the question: why did it work? FoG has complex, multi-factorial origins and manifests in various forms. However, previous studies have noted a step-by-step reduction in stride length preceding FoG, known as the "sequence effect6,7." In this study, the sequence effect was observed in the participant: without assistance, stride length significantly deteriorated over time, leading to FoG. In contrast, with the exosuit's assistance, stride length remained steady, with no FoG episodes observed. Moreover, stride length was notably greater during assisted walking compared to unassisted walking. Although the sequence effect does not explain all FoG phenotypes, it appeared relevant in this case. Since hip flexion is crucial for limb advancement and maintaining stride length, assisting this joint motion effectively sustained stride length and prevented FoG.
These promising findings prompt further investigation to validate the effects of the robotic apparel on a broader range of individuals with PD experiencing FoG, across various FoG phenotypes, and within diverse environments and task contexts. This study could catalyze technological advancements to address this critical yet unmet need8.
References
- 1 Dorsey, E. R. et al. Global, regional, and national burden of Parkinson's disease, 1990-2016: a systematic analysis for the Global Burden of Disease Study 2016. Lancet Neurol. 17, 939-953 (2018).
- 2 Nutt, J. G. et al. Freezing of gait: moving forward on a mysterious clinical phenomenon. Lancet Neurol. 10, 734-744 (2011).
- 3 Cui, C. K. & Lewis, S. J. G. Future therapeutic strategies for freezing of gait in Parkinson's disease. Front. Hum. Neurosci. 15, 741918 (2021).
- 4 Kim, J. et al. Soft robotic apparel to avert freezing of gait in Parkinson's disease. Nat Med 30, 177-185 (2024).
- 5 Kim, J. et al. Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit. Sci. Rep. 12, 11004 (2022).
- 6 Iansek, R., Huxham, F. & McGinley, J. The sequence effect and gait festination in Parkinson disease: contributors to freezing of gait? Mov. Disord. 21, 1419-1424 (2006).
- 7 Chee, R., Murphy, A., Danoudis, M., Georgiou-Karistianis, N. & Iansek, R. Gait freezing in Parkinson's disease and the stride length sequence effect interaction. Brain 132, 2151-2160 (2009).
- 8 Bohnen, N. I. et al. Discussion of research priorities for gait disorders in Parkinson's disease. Mov. Disord. 37, 253-263 (2022).