Pioneering the Future of In-Space Transportation and Robotics Technologies
Professor Hyeongjun Park
- In-Space Servicing, Assembly, and Manufacturing(ISAM)
- Planetary Robotics and Mobility
- Orbital Transfer Vehicles
Space exploration is rapidly evolving, and at the forefront of this transformation is the Space Mobility and Robotics Lab(SMRL) at Seoul National University. Led by Professor Hyeongjun Park, the lab focuses on developing cutting-edge technologies that enable advanced space transportation and exploration. With a robust portfolio of research in space robotics, flight dynamics, and space systems, SMRL plays a crucial role in shaping the future of space missions.
A Hub for Innovation in Space Mobility and Robotics Technology
The mission of SMRL is clear: to advance the capabilities of space systems, ensuring safer, more efficient, and more autonomous operations in space. The lab's research spans a wide range of disciplines, including autonomous spacecraft operations, precision flight dynamics, and sophisticated space robotics. These areas are vital for the future of space transportation, space stations, and interplanetary missions. "At SMRL, we aim to push the boundaries of what is possible in space exploration," says Professor Hyeongjun Park. "We are committed to creating solutions that will make in-space transportation more autonomous, reliable, and versatile."
Key Projects and Breakthroughs
SMRL's contributions to the field are both wide-ranging and significant. Some of the lab's most notable projects include:
1. Autonomous Spacecraft Rendezvous and Docking: As space missions become more complex, the ability of spacecraft to autonomously dock with space stations, satellites, or other vehicles is critical. SMRL has developed cutting-edge algorithms and control systems that allow spacecraft to rendezvous and dock with high precision and autonomy, significantly improving mission safety and efficiency.
2. Guidance and Control for NASA's Astrobee Robots: SMRL played a key role in the development of advanced guidance and control techniques for NASA's Astrobee robots, which are currently onboard the International Space Station (ISS). These free-flying robots assist astronauts with routine tasks and demonstrate SMRL's expertise in creating autonomous systems capable of operating in challenging space environments.
3. On-Orbit Servicing and Assembly: One of the lab's flagship research areas is on-orbit servicing and assembly using multiple space systems. SMRL is developing robust, predictive, and learning-based guidance algorithms that allow spacecraft to perform repairs, upgrades, and assembly of space structures autonomously. These technologies are essential for maintaining satellites, constructing space habitats, and enabling long-term human space exploration.
Focus Areas: Advanced Robotics, Flight Dynamics, and Space Systems
At the core of SMRL's success are three main research pillars:
-
Advanced Space Robotics: The lab is pioneering the development of autonomous robotic systems capable of performing complex tasks in space, such as servicing spacecraft, assembling structures, and assisting astronauts during missions.
-
Spacecraft Flight Dynamics and Control: SMRL is renowned for its contributions to the field of flight dynamics, particularly in creating algorithms that allow spacecraft to maneuver with precision and reliability. This expertise is critical for autonomous operations, including rendezvous and docking, station-keeping, and orbital transfers.
-
Space Systems for In-space Transportation: As space missions require more efficient and sustainable transportation methods, SMRL is working on the design and development of space systems that support in-orbit transfers, deep-space missions, and more.
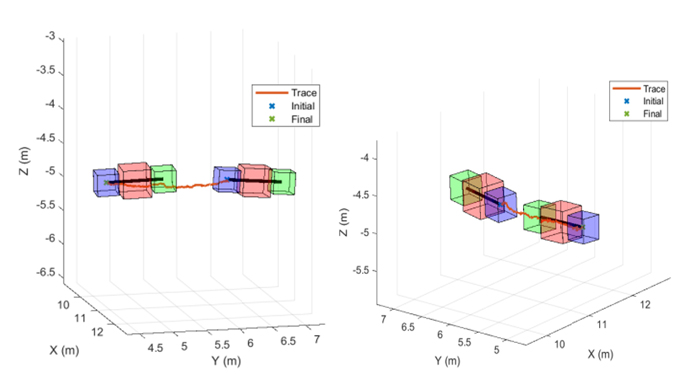
SMRL along with an international joint research team consisting of the U.S. Naval Postgraduate School, New Mexico State University, and NASA's Ames Research Center, successfully conducted a space towing and transport experiment using the autonomous flying robot Astrobee, which operates on the International Space Station(ISS), in January 2024 (Figures 1 and 2). Through this experiment, the team secured foundational towing and transport control technologies necessary for ISAM missions using multiple spacecraft. Additionally, they successfully demonstrated part of NASA's space robot mission, which will be utilized in the Gateway, a lunar orbiting space station.
Prior to this experiment, the joint research team had conducted two space transport experiments on the ISS in January and December of 2023. A paper analyzing the results of these experiments was invited to the special session on Space Mobility and Logistics at the 2024 AIAA SciTech Forum. At the session, hosted by the U.S. Space Force's Space Systems Command, SMRL's paper was selected as the best paper of the special session.

Building a Future in Space
With a strong focus on collaboration with international space agencies such as NASA, as well as private space companies, SMRL is well-positioned to contribute to the next generation of space exploration. From designing systems that enhance the autonomy of spacecraft to creating robotic solutions that improve the sustainability of space operations, the lab is making strides toward a future where space is more accessible, habitable, and navigable.
For more information on the groundbreaking work being done at the Space Mobility and Robotics Lab, visit their website at smrl.snu.ac.kr.