정윤종
기계공학부 4
정윤종
기계공학부 4
광교 캠퍼스에 위치한 서울대학교 융합과학기술대학원에서는 방학마다 학부생에게 융합 연구 및 연구실 경험의 기회를 부여하는 융합연구프로그램을 진행하고 있습니다. 융합연구프로그램을 통해 겨울 방학 동안 동적로봇시스템 연구실에서 학부생 인턴을 경험하는 기회를 얻게 되었습니다. 연구실 인턴 활동을 통해 학부에서 배웠던 지식이 어떻게 로봇에서 응용되는지 공부해볼 수 있었습니다.

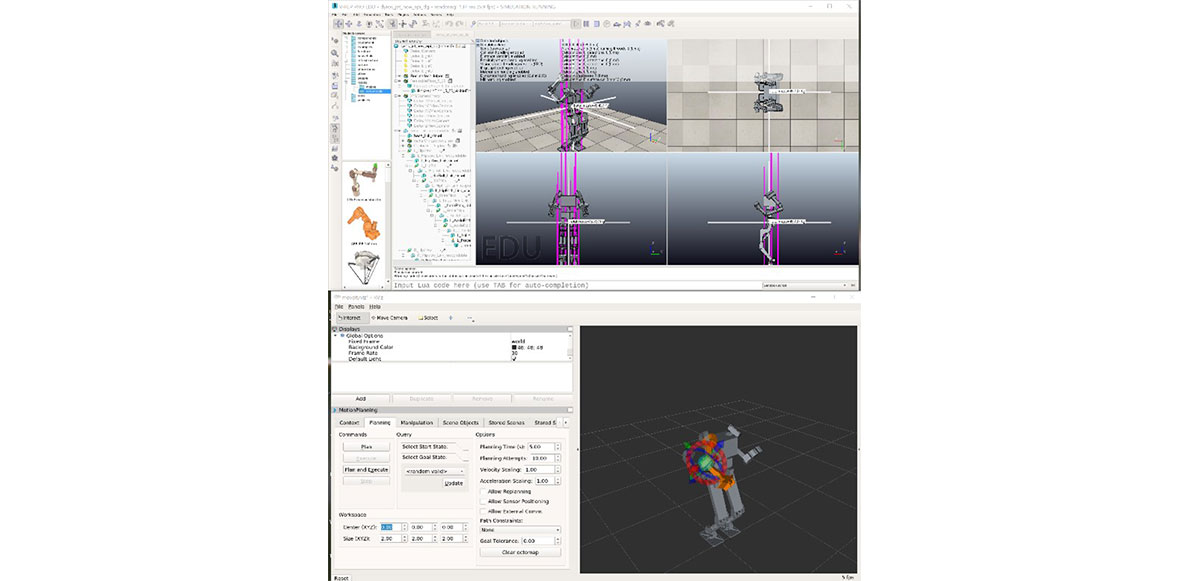
서울대학교 동적로봇시스템 연구실(DYROS LAB, 박재흥 교수님)에서는 휴머노이드 로봇 보행, 매니퓰레이터 제어, 재활로봇, AI, 자율주행 등 로봇과의 상호작용에 필요한 다양한 연구를 진행하고 있습니다. 특히 연구실에서는 지난 9월, 전 세계 99개 팀이 참가한 아바타 로봇 경연대회 ‘ANA Avatar XPRIZE’ 대회에서 8위의 성적으로 결선에 진출하였는데요. 영화 <아바타>에 나오는 것처럼 멀리 떨어져 있는 사람의 움직임대로 로봇이 움직이고, 이러한 원격 제어를 통해 대회에서는 퍼즐 맞추기, 상대방과 건배하기 등의 미션을 수행했다고 합니다. 이번 겨울 동안 저는 DYROS 연구실의 아바타 로봇 ‘TOCABI(도깨비)’ 원격 제어에 필요한 팔 부위의 손목 햅틱 기구의 디자인에 인턴으로 참여했습니다.
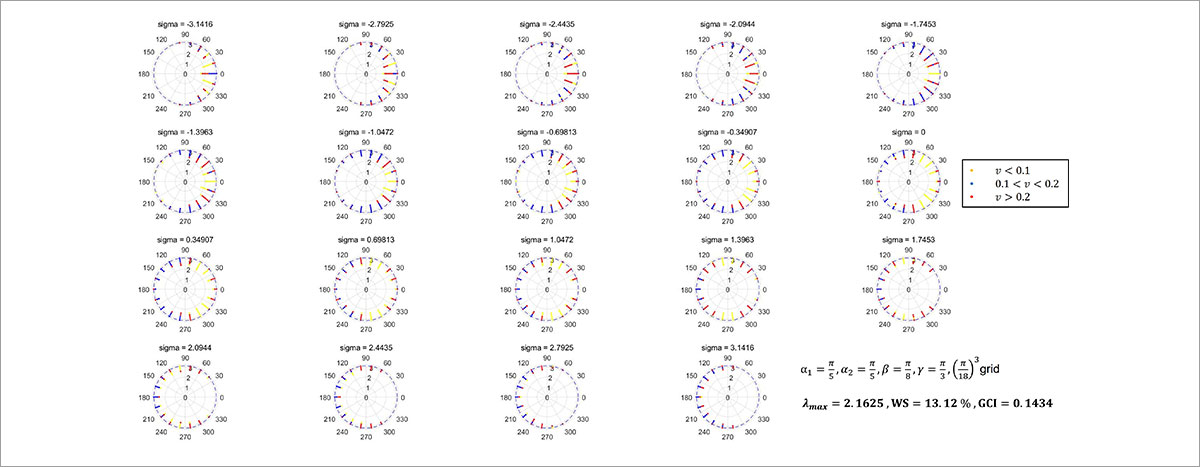
햅틱 기구의 디자인을 위해 구면 병렬 메커니즘, 병렬 기구의 작업공간 분석, 메커니즘의 manipulability나 dexterity 분석 및 최적화 등에 대한 논문을 살펴보고, 디자인하고자 하는 기구에 적용하고자 시도해보았습니다. 특히 ‘동역학’이나 ‘로봇공학입문’ 강의를 통해서 배운 기구학, 역기구학, screw theory 등의 지식을 활용하여 특정 geometry를 갖는 구면 병렬 기구가 어떠한 방향 작업공간에서 가동 가능한지를 분석하여 보았고, 각 자세에서 성능 및 요구되는 모터 토크 스펙 등을 MATLAB을 이용하여 계산하였습니다. 학부 수업에서 배웠던 지식을 실제적으로 어떻게 활용할 수 있는지 느껴볼 수 있어 매우 유익하면서도 재미있는 경험이었으며, 졸업논문 등을 통해 이번 경험을 발판으로 관련 연구를 이어나가고 싶다는 생각이 들었습니다.
햅틱 기구의 디자인을 위해 구면 병렬 메커니즘, 병렬 기구의 작업공간 분석, 메커니즘의 manipulability나 dexterity 분석 및 최적화 등에 대한 논문을 살펴보고, 디자인하고자 하는 기구에 적용하고자 시도해보았습니다. 특히 ‘동역학’이나 ‘로봇공학입문’ 강의를 통해서 배운 기구학, 역기구학, screw theory 등의 지식을 활용하여 특정 geometry를 갖는 구면 병렬 기구가 어떠한 방향 작업공간에서 가동 가능한지를 분석하여 보았고, 각 자세에서 성능 및 요구되는 모터 토크 스펙 등을 MATLAB을 이용하여 계산하였습니다. 학부 수업에서 배웠던 지식을 실제적으로 어떻게 활용할 수 있는지 느껴볼 수 있어 매우 유익하면서도 재미있는 경험이었으며, 졸업논문 등을 통해 이번 경험을 발판으로 관련 연구를 이어나가고 싶다는 생각이 들었습니다.