Emerging Trends in Medical Robotics Technology and Development
Introduction

Amy Kyungwon Han
Medical robotics is advancing innovation across diverse domains, including precision surgery, rehabilitation, and patient care. While traditional rigid robots offer high positional accuracy, they often lack compliance, increasing the risk of tissue damage and limiting natural human interaction. As a result, soft robotics-based on soft and flexible materials-is gaining increasing attention.
Soft robotic systems utilize compliant materials such as silicone, hydrogels, and electroactive polymers (EAPs), enabling natural integration with biological tissues. These systems employ actuation mechanisms driven by pneumatics, hydraulics, and smart materials, allowing safer and more adaptive operation than conventional rigid systems. Thanks to these advantages, soft robotics is actively explored for applications in implantable medical devices, rehabilitation tools, telemedicine systems, and surgical robots. This article focuses on recent advances in implantable medical robots and surgical-assistive haptic devices powered by soft robotics.
Applications of Soft Robotics in the Medical Field
Implantable Medical Robots
Implantable medical robots are designed to be inserted into the body to assist physiological functions or enhance therapeutic outcomes. Conventional implantable devices, typically fabricated from rigid plastics or metals, may induce adverse effects such as inflammation or fibrosis during long-term use due to their stiffness and friction against surrounding tissues. Their fixed structures also limit adaptability to the body’s dynamic internal environment.
To address these limitations, soft robotics offers a promising alternative. With mechanical properties closer to those of biological tissue, soft implantable robots can conform and deform gently within the body, enhancing compatibility and function. Utilizing pneumatic or hydraulic actuation, these robots can dynamically compress or guide tissue movement without external mechanical hardware, thereby improving therapeutic effectiveness.
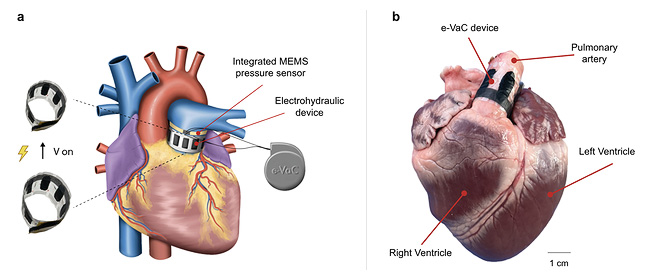
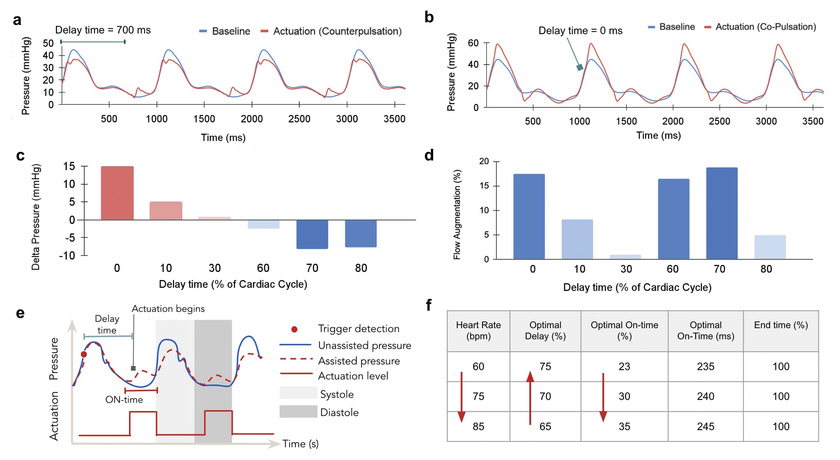
One example is the electrohydraulic vascular compression device (e-VaC), a soft actuator developed to support blood flow in patients with heart failure1). This device wraps around the pulmonary artery and modulates pressure by applying compression during systole to increase systolic peak pressure and during diastole to decrease peak pressure, leveraging a co-pulsation or counter-pulsation effect. Unlike conventional mechanical pumps, the e-VaC uses soft materials to enable safer and more patient-specific interventions.
Surgical Assistance and Haptic Feedback Devices
Tactile perception plays a critical role in surgical procedures, particularly when distinguishing tissue properties or detecting penetration events. While robotic surgical systems enhance visual feedback through high-resolution cameras and articulated instruments, they often lack adequate haptic feedback. This absence is especially problematic in remote or robot-assisted surgery, where it is difficult to sense tissue stiffness or resistance, even for experienced clinicians.
To overcome this, soft robotics-based haptic feedback systems are being developed to restore tactile sensation in remote surgical environments. These systems employ compliant materials and smart actuators to safely transmit localized force information to the fingertips or skin, enabling more intuitive tissue interaction.
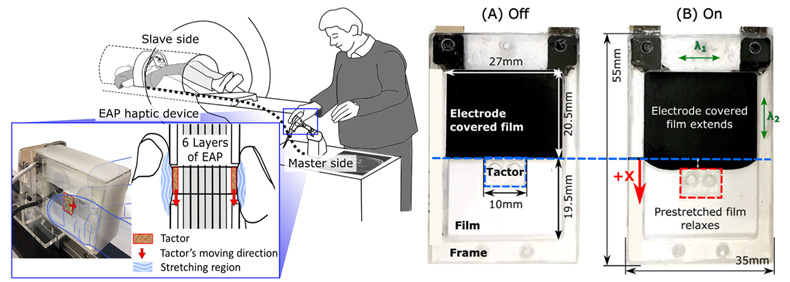
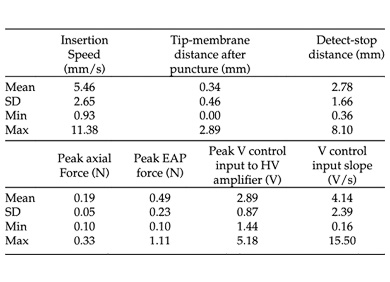
A recent development in this domain is a soft haptic device for remote needle insertion2). Using electroactive polymer actuators that stretch the skin between the thumb and index finger, the device delivers realistic feedback simulating membrane puncture. In a user study, participants detected the moment of membrane penetration with 98% accuracy, even without visual cues-demonstrating the potential of soft haptics to improve both surgical safety and precision.
Recent Research and Technological Developments
The field of soft robotics is rapidly evolving to meet the growing demand for safer, more personalized, and remotely deliverable medical treatments. Key areas of current research include:
- Self-Healing and Biomimetic Materials: Recent efforts have introduced self-healing hydrogels capable of recovering after damage. These materials enhance the long-term reliability of implantable or wearable soft medical devices by minimizing repair needs3).
- AI and Digital Twin Integration: Machine learning-based controllers are increasingly combined with digital twins-virtual replicas of patient-specific anatomy-to enable real-time simulation and optimization of robotic behavior4).
- Remote Surgery and Telemedicine: With the expansion of 5G and high-speed data infrastructure, remote surgical systems with integrated soft haptics and AI-based control are being developed. These next-generation platforms aim to provide tactile feedback to surgeons across long distances and are currently being evaluated in early-stage clinical trials5).
Conclusion and Outlook
Soft robotics is emerging as a transformative platform in medical technology, offering solutions that overcome the limitations of traditional rigid systems. By enabling safer interactions, improved adaptability, and more intuitive control, soft robotic systems are contributing to advances in personalized medicine and remote healthcare delivery. Continued integration of biomimetic materials, intelligent control algorithms, and telemedical frameworks will further expand the role of soft robotics in future clinical applications.
References
- 1) Pirozzi, I., et al. "Electrohydraulic Vascular Compression Device (e-VaC) with Integrated Sensing and Controls." Advanced Materials Technologies 8.4 (2023): 2201196.
- 2) Han, A.K., et al. "MR-compatible haptic display of membrane puncture in robot-assisted needle procedures." IEEE transactions on haptics 11.3 (2018): 443-454.
- 3) Zhao, X., et al. "Hydrogels in Soft Robotics: Past, Present, and Future." ACS Nano 17.1 (2023): 37-48
- 4) Kang, J., et al. "Generative AI-Driven Human Digital Twin in IoT-Healthcare: A Comprehensive Survey." arXiv preprint arXiv:2401.13699 (2024).
- 5) Meng, L., et al. "Digital Twin Assisted Surgery: Concept, Opportunities, and Challenges." npj Digital Medicine 7.1 (2024): 14.