
Optimizing ocean and coastal route planning to minimize fuel consumption
Implementing obstacle detection and tracking systems employing various sensors
Enhancing ship collision avoidance technology for secure navigation
Professor Myung-Il Roh, from the Department of Naval Architecture and Ocean Engineering, is actively engaged in the development of diverse autonomous navigation technologies for smart ships.
A ship navigates along predetermined routes and recognizes potential obstacles in its vicinity using human observation or onboard sensors. In the event of an obstacle, such as another ship, being detected and a potential collision foreseen, the ship promptly takes evasive actions to ensure a safer route. Once clear of the danger, the ship seamlessly resumes its planned route. It is important to note that route planning, obstacle detection, and collision prevention processes are recurring elements throughout the voyage. Unlike conventional ships that primarily rely on human intervention for these tasks, smart ships rely on automation and intelligent systems. Professor Roh and his team are currently focused on researching autonomous navigation technologies, including route planning, obstacle detection and tracking, as well as ship collision avoidance technologies.
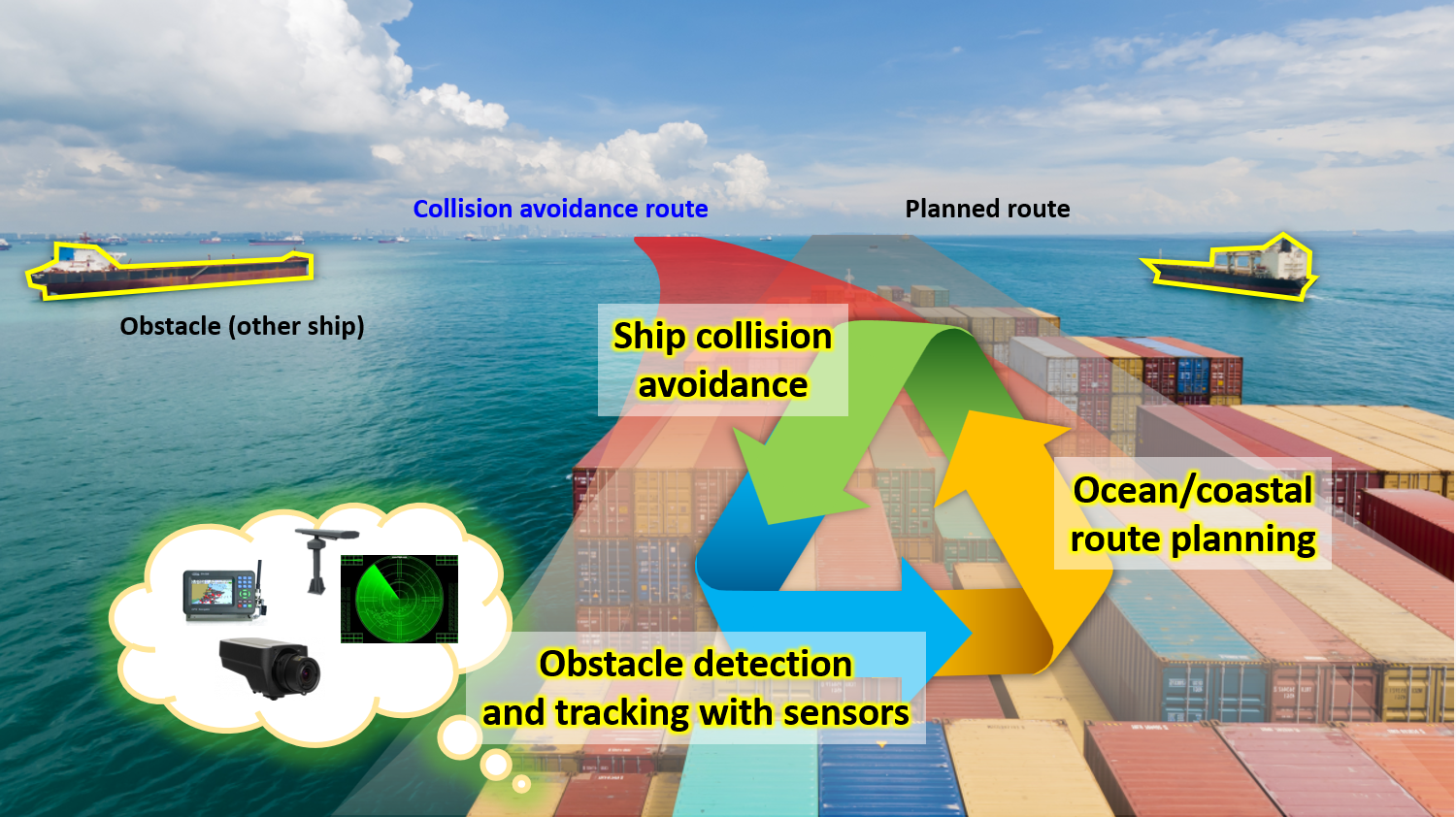
Figure An example of autonomous navigation technologies for smart ships
Recently, there has been a remarkable surge in interest in route planning, driven by considerations of cost-effectiveness, environmental impact, and safety. This interest isn’t limited to smart ships alone; even conventional ships are increasingly adopting advanced route planning technology. In response to this escalating demand, researchers are exploring various methods for route planning in both open ocean and coastal settings. Instead of focusing solely on finding the shortest path, recent years have seen a shift towards methods that prioritize minimizing fuel consumption and enhancing overall economic and safety factors.
A noteworthy development is the transition from the traditional route planning, which determined the route first and then optimized the speed, to the contemporary approach of concurrently calculating both the route and speed. Professor Roh and his team have introduced a method that simultaneously determines a ship's route and speed based on highly accurate predictions of future sea conditions, the ship's performance in response to these conditions, and the expected fuel consumption. This method has been successfully commercialized and is now in use on ships constructed by major shipyards.
Furthermore, the application of autonomous navigation technology to yachts, extending beyond coastal passenger ships, has sparked a growing interest in optimizing route planning for coastal waters. This requires the development of rapid and sophisticated route planning methods capable of considering complex coastlines and varying water depths. In this pursuit, Professor Roh and his team have designed a proprietary method tailored for deployment in coastal and marina areas, currently being employed on autonomous yachts.
Concerning ship perception technologies, these technologies comprise three primary categories: detection, localization, and tracking. Detection relies on sensors to identify nearby obstacles, localization estimates the relative position and orientation of surrounding obstacles, and tracking focuses on gauging an obstacle’s motion over time, including its path, speed, and direction. Smart ships utilize a diverse array of sensors for obstacle recognition, including AIS (Automatic Identification Systems), RADAR (RAdio Detection And Ranging), LIDAR (LIght Detection And Ranging), and cameras, among others. Each sensor has its distinct advantages and disadvantages and requires varying skill sets for effective use. For instance, AIS requires tracking technology, RADAR demands both detection and tracking technology, and cameras rely on detection, localization, and tracking technology.
Cameras, in many ways, are versatile and cost-effective, but they require a substantial amount of technology. Recent advancements in deep learning technology have spurred active research in ship perception technology that leverages cameras. However, it is essential to acknowledge that cameras have their limitations, and to achieve accuracy, sensor fusion technology is employed. This technology combines the detection results from different sensors to produce precise outcomes. Professor Roh and his team have developed a technology that harmoniously merges data from various sensors to accurately detect, localize, and track obstacles around ships. This innovative approach is currently in use on small unmanned ships within shipyards and research centers.
The increasing number of maritime transportation ships is contributing to a progressively intricate operational environment at sea. This rising complexity elevates the risk of ship collisions, particularly in the challenging coastal waters. When other ships are detected in proximity to one’s own ship, it becomes essential to take measures to prevent potential collisions. To achieve this, technology is required that can quantitatively assess collision risks and generate avoidance paths when these risks exceed acceptable thresholds. Methods for ship collision avoidance can be broadly divided into traditional approaches and those employing deep learning, depending on how they generate collision avoidance paths. Traditional methods offer the advantage of operating according to predefined algorithms, typically generating suitable collision avoidance paths under regular operational conditions. However, they may encounter difficulties when dealing with scenarios involving multiple ships approaching the own ship or sudden maneuvers by other ships. In response to these challenges, Professor Roh and his team have devised a method that harnesses deep reinforcement learning, a type of deep learning. This approach effectively mitigates collision risks even in complex scenarios and is currently undergoing testing for integration into smart ships at shipyards.
In this industry, we require technology that is not only innovative but also adaptable to changing environmental conditions. The maritime field presents unique challenges that demand constant technological evolution, incorporating the latest advancements from other domains as needed, and subjecting these innovations to rigorous testing and application. As trust in AI technology continues to grow, its relevance and significance in the maritime field will undoubtedly expand. We understand that even a technology that typically performs flawlessly can lead to substantial harm if it fails just once. Nevertheless, a reluctance to embrace new technologies can leave us at a disadvantage in a competitive landscape. While it is crucial to push the boundaries of technology, it is equally important to emphasize the advantages of its implementation. In the long run, such technology may indeed replace certain human functions, but in the short term, it should be regarded as a valuable tool to assist humans in their decision-making processes.
For further information, please contact Prof. Myung-Il Roh.
References
- M.I. Roh, Determination of an Economical Shipping Route Considering the Effects of Sea State for Lower Fuel Consumption, Int. J. Nav. Archit 5(2), 246-262, 2013
- S.M. Lee et al., Method for a Simultaneous Determination of the Path and the Speed for Ship Route Planning Problems, Ocean Eng. 157, 301-312, 2018
- H.W. Lee et al., Ship Route Planning in Arctic Ocean Based on POLARIS, Ocean Eng. 234, 109297, 2021
- W.J. Lee et al., Detection and Tracking for the Awareness of Surroundings of a Ship Based on Deep Learning, J. Comput. Des. Eng. 8(5), 1407-1430, 2021
- H.W. Lee et al., Data Association for Autonomous Ships Based on the Virtual Simulation Environment, Ocean Eng. 281, 114646, 2023.
- L. Zhao et al., COLREGs-Compliant Multiship Collision Avoidance Based on Deep Reinforcement Learning, Ocean Eng. 191, 106436, 2019
- J.S. Ha et al., Quantitative Calculation Method of the Collision Risk for Collision Avoidance in Ship Navigation Using the CPA and Ship Domain, J. Comput. Des. Eng. 8(3), 894-909, 2021
- D.H. Chun et al., Deep Reinforcement Learning-based Collision Avoidance for an Autonomous Ship, Ocean Eng. 234, 109216, 2021
- M.I. Roh, Determination of an Economical Shipping Route Considering the Effects of Sea State for Lower Fuel Consumption, Int. J. Nav. Archit 5(2), 246-262, 2013
- S.M. Lee et al., Method for a Simultaneous Determination of the Path and the Speed for Ship Route Planning Problems, Ocean Eng. 157, 301-312, 2018
- H.W. Lee et al., Ship Route Planning in Arctic Ocean Based on POLARIS, Ocean Eng. 234, 109297, 2021
- W.J. Lee et al., Detection and Tracking for the Awareness of Surroundings of a Ship Based on Deep Learning, J. Comput. Des. Eng. 8(5), 1407-1430, 2021
- H.W. Lee et al., Data Association for Autonomous Ships Based on the Virtual Simulation Environment, Ocean Eng. 281, 114646, 2023.
- L. Zhao et al., COLREGs-Compliant Multiship Collision Avoidance Based on Deep Reinforcement Learning, Ocean Eng. 191, 106436, 2019
- J.S. Ha et al., Quantitative Calculation Method of the Collision Risk for Collision Avoidance in Ship Navigation Using the CPA and Ship Domain, J. Comput. Des. Eng. 8(3), 894-909, 2021
- D.H. Chun et al., Deep Reinforcement Learning-based Collision Avoidance for an Autonomous Ship, Ocean Eng. 234, 109216, 2021
