Developed based on the principle of how plant roots grow through stones
Expected to be used for underwater exploration and construction

From left, Professor Ho-Young Kim, Professor Jeong-Yun Sun, Researchers Hyeonuk Na, Yong-Woo Kang, Chang Seo Park, and Sohyun Jung of Seoul National University
A joint research team of Professor Jeong-Yun Sun of the Department of Materials Science and Engineering and Ho-Young Kim of the Department of Mechanical Engineering (First authors: Researchers Hyeonuk Na, Yong-Woo Kang, Chang Seo Park, and Sohyun Jung) has developed a soft gel actuator that can generate a force large enough to break a brick within a short time.
This new soft gel actuator was invented based on the cell structure of plants containing soft substances inside the tough cell walls, and can generate much greater force than conventional gels.
The soft actuator is a driving device made of a flexible and stretchable material and is responsible for the movement of the soft robot. Hydrogel, in particular, is attracting attention as a material for soft actuators for future robots due to its excellent biocompatibility and stimuli responsiveness. However, the conventional soft gel actuators have had limitations for being inherently slow and weak, making it difficult to use them in future industrial fields such as artificial muscles or biomimetic robots.
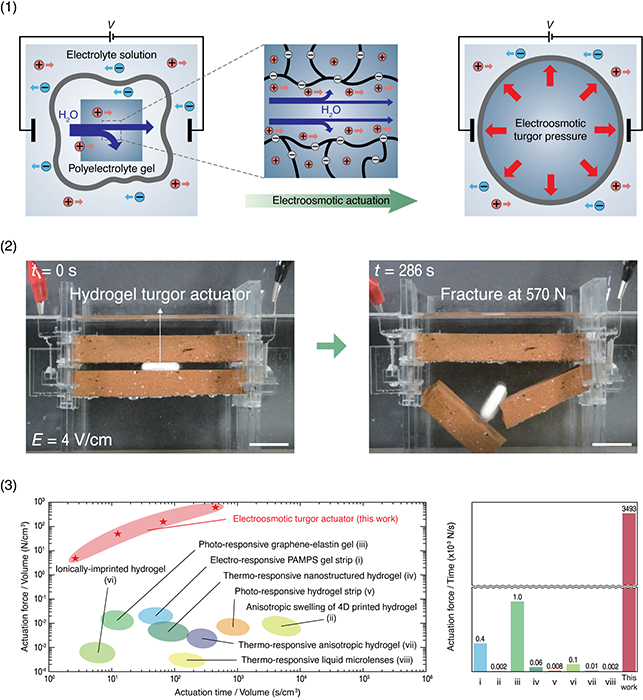
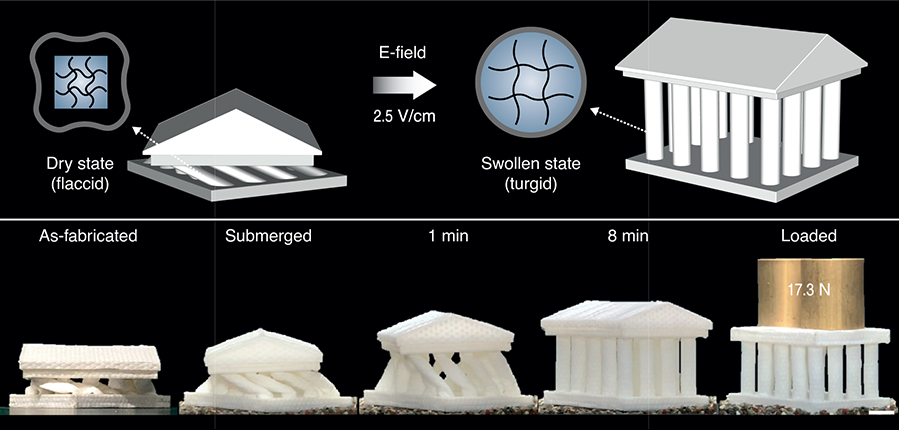
The soft gel actuator developed by the joint research team of Professor Jeong-Yun Sun and Ho-Young Kim has a simple structure and can generate a very large force without an external power source. The tough cell wall of a plant cell can withstand the internal pressure that rises as water is sucked into the cell, and the force is strong enough to allow roots to break and grow through stones. The actuator fabricated with a hydrogel wrapped in a selectively permeable membrane based on the cell wall of a plant cell, and as the hydrogel expands by osmotic pressure in an underwater environment, about 1 g of hydrogel can lift 130 kg without an external power source. These results show that the output density is about 100,000 times greater than that of the conventional gel-based actuator.
In addition, when also utilizing an electric field as an external power source, the actuator may generate a large force at a high speed by adding electroosmosis to the osmosis. The research team showed that under an electric field, the actuator weighing about 1 g can break a 2 cm thick brick in 5 minutes.
The research team explained the applicability of the research, mentioning that “Using the excellent portability and high-power actuation of the soft gel actuator developed in this study, it will be possible to form a rigid structure and use it for the construction of floating buildings and subsea cities without complicated and heavy processes.” The research results are expected to greatly expand the application area of hydrogel and soft robots.
Professor Jeong-Yun Sun stated that “this is a study that overcomes the fundamental limitations of soft gel actuators, and will become the base technology for manufacturing high-power-density soft actuators. It will also contribute to the commercialization of artificial muscles, soft robotics, biomedical engineering, etc.” Professor Ho-Young Kim added that "along with the development of new soft actuators, the establishment of a physical model that predicts performance will greatly help in the optimal design of soft machines.”
The research findings were published on April 15, 2022, in
<Science>, the world's most prestigious academic journal.
For further information, please contactProf. Jeong-Yun Sun and Prof. Ho-Young Kim.