Focused on determining the mechanical strength according to the moisture content of the living tissue
Expected to lead to an innovative leap forward in the field of next-generation soft robotics

Professor Seung Hwan Ko
Professor Seung Hwan Ko's team of the Department of Mechanical Engineering has developed a technology that can freely convert the state of a material from a soft state, like an octopus, to that of the joint of a vertebrate.
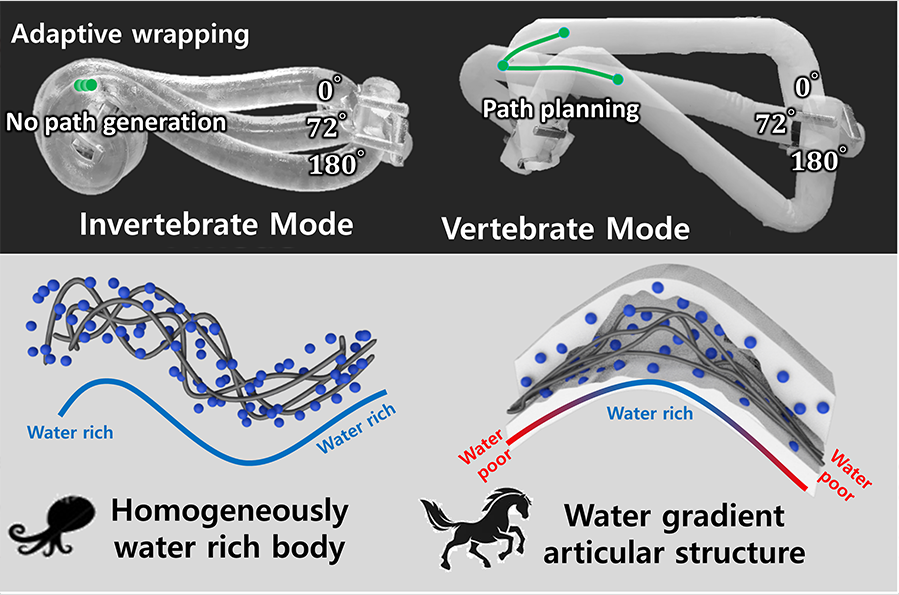
The body of a living creature has evolved into a form that is optimized for the environment in which it lives and animals such as octopuses have a soft body to survive in narrow rock crevices, while vertebrates have a body based on a joint structure made of bone and cartilage for efficient power transmission.
The mechanical properties of these biological tissues are determined by the amount of moisture contained, and overall, the octopus' body contains large amounts of moisture as a whole, but the joints of vertebrates consist of a combination of cartilage that has a lot of moisture as well as bones that have very little moisture.
Joint structures have a finite degree of kinematic freedom by allowing only deformation of areas with relatively weak mechanical rigidity (knees, elbows). These characteristics are not suitable for entering and exiting narrow gaps, but allow accurate transmission of force, and overall, have opposite characteristics to the joint structures with soft characteristics, such as that of the octopus's body.
The research team has developed a technology that can control local moisture content at any desired moment in a soft overall state by using the phenomenon of depriving the hydrogel of moisture when the supersaturated sodium acetate trihydrate is crystallized.
Accordingly, this transformation was reversibly possible by spatially controlling the thermodynamic interaction of hydrogel molecules and sodium acetate trihydrate.
Meanwhile, this study, with technology that can form and remove joint structures at desired locations that is beyond the existing research that simply converts rigidity, is expected to result in an innovative leap forward in the field of next-generation soft robots, and the research paper was published in the international journal <Advanced Science> on August 27.
Figure
Characteristics of bodily moisture distribution in non-vertebrate animals and vertebrates
and the kinematic characteristics of the simulated system
For further information, please contact Prof. Seung Hwan Ko.
